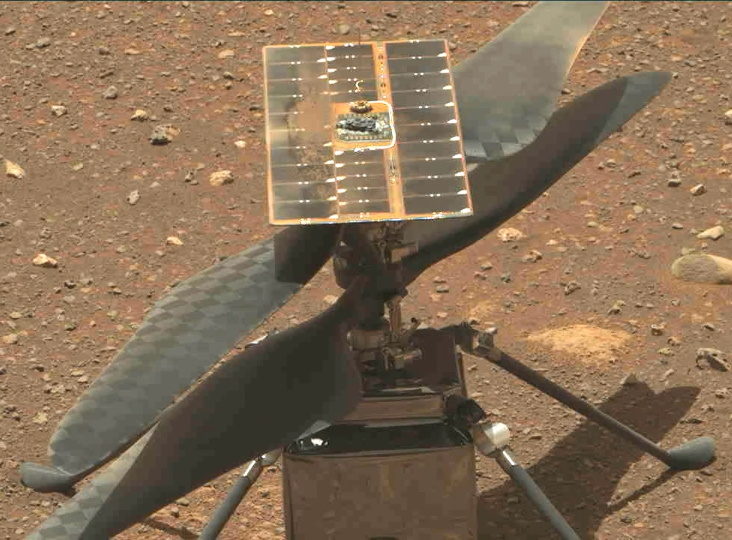
Марсіанський вертоліт «Ingenuity» (укр. Винахідливість) — роботизований дрон-розвідник, для дослідження можливості польотів в атмосфері Марса, дослідження поверхні Марса з метою спрямування подальших пересувань ровера «Персеверанс».
Конструкція
Дрон «Ingenuity» збудований JPL в якості демонстраційної технології для перевірки здатності до безпечного польоту, а також забезпечення кращого картографування та орієнтації, що надасть більше інформації для побудови безпечних маршрутів майбутніх місій, допоможе у пошуках цікавих місць для дослідження. Гелікоптер має отримувати зображення, які приблизно в десять разів перевищуватимуть роздільну здатність зображень з орбіти Марса, а також буде відображати особливості, які не помітять камери марсохода. Очікується, що такі дрони зможуть забезпечити втричі більшу безпечну прохідність за один марсіанський день. Ця демонстраційна технологія може стати базою для побудови більш функціонального літального апарату для дослідження Марса, а також інших небесних тіл з атмосфери. Наступне покоління гелікоптерів може бути масою в межах 5-15 кг з науковим навантаженням масою 0,5-1,5 кг. Такий апарат може мати прямий зв’язок з орбітальним апаратом, а також може працювати окремо від наземного апарату. Майбутні дрони можуть бути використані для дослідження особливих місцевосцей з льодом у грунті, в яких можуть бути виявлені ознаки минулого життя. Марсіанські дрони можуть також збирати зразки та транспортувати їх до транспортного засобу для відправки їх на Землю.
Дрон буде використовувати співвісні гвинти діаметром 1.1 м. Його корисне навантаження складатиметься з камери з високою роздільною здатністю для навігації, приземлення і вивчення поверхні, а також системи комунікації з марсоходом. Незважаючи на те, що це літальний апарат, він сконструйований як космічний апарат і здатний витримати перевантаження під час запуску. Апарат має захищені від впливу радіації системи, здатні працювати у жорстокому навколишньому середовищі Марса. Через слабкість і нестійкість магнітного поля Марса, використання компаса для навігації неможливо, тому в систему навігації апарату буде вбудована камера із сонячним трекером. Також можливе використання гіроскопа, візуального одометра, інклінометра, альтиметра й інших датчиків. Для підзарядки дрона будуть використовуватися сонячні батареї — шість літій-іонних батарей Sony ємністю 2 А·год. Дрон використовує процесор Qualcomm Snapdragon та операційну систему Лінукс, в якій також реалізовано візуальну навігацію за допомогою оцінки швидкості, отриманої від функцій, відстежених за допомогою камери. Процесор з’єднаний з двома контролерами польоту для виконання необхідних польотних функцій. Зв’язок з ровером здійснюється за допомогою радіозв’язку ZigBee реалізовано через 900 Мгц чіпсети SiFlex 02 встановлених на ровері та на дроні. Система зв’язку підтримує швидкість обміну даними 250 кб/с на відстані до 1 км. Дрон під час польоту до Марса буде закріплений на днищі марсохода і буде від’єднаний на поверхні у проміжку між 60 та 90 солами після приземлення. Після чого, ровер віддалиться від дрона приблизно на 100 м для здійснення тестового польоту останнього.

Як проходили випробування гелікоптера
Спочатку марсохід Персеверанс знайшов потрібну рівну площадку для льотних тестів. Потім встановив вертоліт Інженюріті на його шасі. Розгортання проходило не квапливо. Були проведенні перші тести, усунено збій програмного забезпечення.
Тест обертання гвинта перед першим злетом.
19 квітня 2021 року вертоліт здійснив перший випробувальний політ в атмосфері іншої планети на Марсі.
За результатами тестування НАСА оцінить перспективність технології. Літаючий дрон повинен буде забезпечити розвідку місцевості для марсіанського ровера. У березні 2018 року проєкт отримав фінансування в розмірі 23 млн доларів США. 11 травня 2018 року було оголошено, що МҐІ стане частиною місії Mars 2020. Очікується до п’яти польтів МҐІ впродовж 30-ти денного тестування цієї нової технології. Кожен політ триватиме не більше 3 хвилин, висота становитиме 3-10 метрів над поверхнею, проте максимальна дистанція дії дрона — до 600 метрів за один політ. МҐІ має автоматичний режим і передаватиме дані марсоходу після кожного повернення. Якщо технологія виявиться успішною, НАСА використовуватиме її у майбутніх місіях до Марса. Керівник проєкту — Мімі Аунґ. Інші учасники — AeroVironment, Дослідницький центр Еймса (НАСА) та Дослідницький центр Ленґліен.
Забігаючи наперед, результат був на стільки успішним, що НАСА планує відправити 2 подібних гелікоптери, щоб в разі поломки марсоходу Персеверанс вони змогли перенести проби грунту до модулю з ракетою, яка виведе зразки породи на орбіту де їх підбере космічний апарат, який доставить їх на Землю.