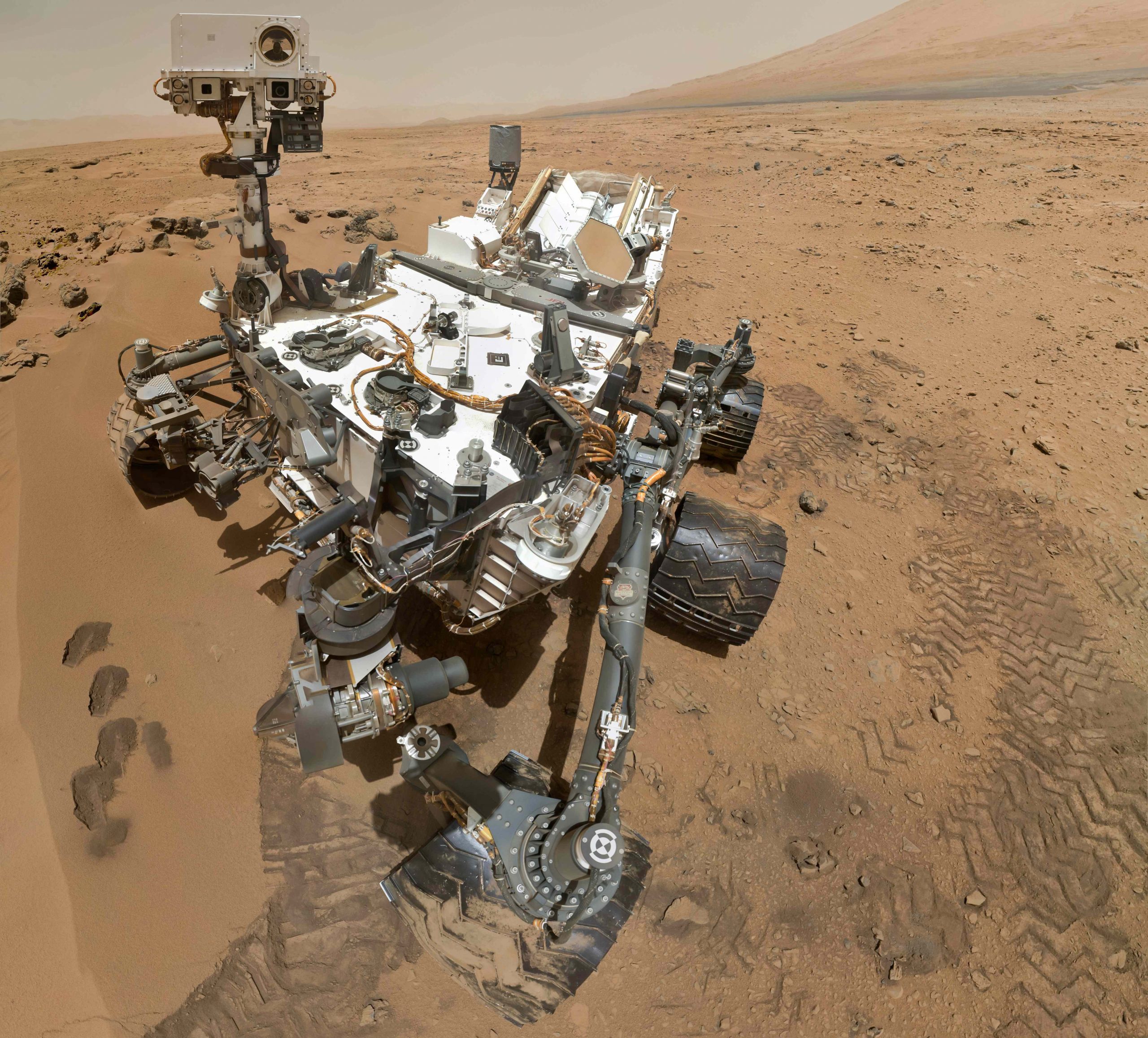
«К’юріосіті» — роботизований ровер, розмірами з автомобіль, який досліджує Марс та є частиною програми NASA Mars Science Laboratory (скорочено MSL, Марсіанська наукова лабораторія).
«К’юріосіті» був запущений з мису Канаверал 26 листопада 2011, в 10:02 за київським часом за допомогою ракети-носія Atlas V 541 № AV-028 на борту Марсіанської космічної лаботаторії і приземлився на Aeolis Palus в кратері Ґейла на Марсі 6 серпня 2012, о 5:17 закиївським часом. Місце посадки Bradbury Landing, розташовується менше ніж в 2,4 км від точки приземлення марсохода після подорожі завдовжки 563 млн км.
Мета марсохода охоплює дослідження клімату та геології Марса; чи були в вибраній ділянці кратера Ґейла коли-небудь сприятливі умови навколишнього середовища для мікробного життя, включаючи дослідження ролі води і заселення планети в процесі підготовки для подальшого освоєння космосу людиною.
24 червня 2014 «К’юріосіті» завершив марсіанський рік 687 земних діб — він виявив, що Марс колись мав умови навколишнього середовища, сприятливі для мікробного життя.
Завдання та цілі місії
MSL має чотири основні цілі:
- З’ясувати, чи існувало коли-небудь життя на Марсі.
- Отримати докладні відомості про клімат Марса.
- Отримати докладні відомості про планетологію Марса.
- Здійснити підготовку до висадки людини на Марс.
Для досягнення цих цілей перед MSL поставлено вісім основних завдань:
- Виявити та встановити природу марсіанських органічних вуглецевих сполук.
- Виявити речовини, необхідні для існування життя: вуглець, водень, азот, кисень, фосфор, сірку.
- Виявити можливі сліди перебігу біологічних процесів.
- Визначити хімічний склад марсіанської поверхні.
- Встановити процес формування марсіанських каменів і ґрунту.
- Оцінити процес еволюції марсіанської атмосфери в довгостроковому періоді.
- Визначити поточний стан, розподіл і кругообіг води та вуглекислого газу.
- Встановити спектр радіоактивного випромінювання на поверхні Марса.
Характеристики марсохода
Маса «К’юріосіті» після м’якої посадки склала 899 кг, у тому числі 80 кг наукового обладнання.
Порівняння «Mars Science Laboratory» з іншими марсоходами
{kind=link}

| К’юріосіті | MER | Sojourner | |
|---|---|---|---|
| Запуск | 2011 | 2003 | 1996 |
| Маса (кг) | 899 | 174 | 10,6 |
| Розміри (В метрах, Д×Ш×В) | 3,1 × 2,7 × 2,1 | 1,6 × 2,3 × 1,5 | 0,7 × 0,5 × 0,3 |
| Енергія (кВт/сол) | 2.5-2,7 | 0,3—0,9 | < 0,1 |
| Наукові інструменти | 10 | 5 | 4 |
| Максимальна швидкість (см/сек) | 4 | 5 | 1 |
| Передача даних (МБ/добу) | 19—31 | 6—25 | < 3,5 |
| Продуктивність (MIPS) | 400 | 20 | 0,1 |
| Пам’ять (МБ) | 256 | 128 | 0,5 |
| Розрахунковий район посадки (км) | 20×7 | 80×12 | 200×100 |
- Розміри: Марсохід має довжину 3 м, висоту з встановленою щоглою 2,1 м, ширину 2,7 м. «К’юріосіті» набагато більше своїх попередників — марсоходів « Спірит» і «Марсохід «Опортюніті»», які мали довжину 1,5 м і масу 174 кг (у тому числі 6,8 кг наукової апаратури).
- Пересування: На поверхні Марса марсохід здатен долати перешкоди до 75 сантиметрів заввишки. Максимальна очікувана швидкість на пересічній місцевості становить 90 метрів на годину у разі автоматичної навігації. Середня ж швидкість становитиме 30 метрів на годину. Очікується, що за час дворічної місії MSL здолає не менше 19 кілометрів. Максимальна швидкість на твердій рівній поверхні становить 144 метра на годину.
- Джерело живлення: «К’юріосіті» живиться від радіоізотопного термоелектричного генератора (РІТЕГ), ним успішно користувалися спусковий апарат Вікінг-1 і Вікінг-2 в 1976 році. Радіоізотопна електрична система (RPSs) є генератором, який виробляє електроенергію від природного розпаду ізотопу плутонію-238. Тепло виділяється при природному розпаді цього ізотопу, і пізніше перетворюється в електроенергію, забезпечуючи постійний струм протягом усього року, вдень і вночі; також тепло може використовуватися для підігріву обладнання (переходячи до них по трубах). При цьому заощаджується електроенергія, яка може бути використана для пересування марсохода і роботи його інструментів. «К’юріосіті» отримує електроживлення від енергоустановки, наданої Міністерством Енергетики США, містить 4,8 кг плутонію-238, закупленого імовірно, в Росії. Плутоній у вигляді діоксиду упакований в 32 керамічні гранули, кожна розміром приблизно в 2 сантиметри. Генератор «К’юріосіті» є останнім поколінням РІТЕГ, зроблений компанією Boeing, і називається «Багатозадачний Радіоізотопний термоелектричний генератор» або MMRTG. Застосований за класичною технологією РІТЕГ, але є більш гнучким і компактним, розрахований на виробництво 125 Вт електричної енергії (0,16 кінських сил в перерахунку на одиниці вимірювання потужності автомобільних двигунів) з приблизно 2 кВт теплової (на початку місії) енергії. З часом MMRTG стане виробляти менше, ніж 125 Вт. При мінімальному терміні служби в 14 років, його вихідна потужність знизиться лише до 100 Вт. Енергоустановка MSL генерує 2,5 кВт*год кожен марсіанський день, що набагато більше, ніж вихід енергоустановок марсоходів Спірит і Марсохід «Опортюніті» (близько 0,6 кВт * год за марсіанський день).
- Система відводу тепла:(HRS) Температура області, в якій буде перебувати «К’юріосіті», у травні може коливатися від +30 до −127°С. Таким чином, система відводу тепла (HRS), прокачує рідину через труби загальною довжиною в 60 м в тілі MSL, щоб чутливі елементи системи перебували в оптимальній температурі. Інші методи нагріву внутрішніх компонентів включають в себе використання тепла, яке було виділено від приладів, а також зайвого тепла від генератора MMRTG. HRS також має здатність охолоджувати свої компоненти, якщо це необхідно. На космічному апараті встановлений кріогенний теплообмінник, вироблений в Ізраїлі компанією Ricor Cryogenic and Vacuum Systems. Він дозволяє зберігати температуру різних відсіків апарату на позначці в — 173 градуса Цельсія.
- Комп’ютер: На марсоході встановлено два однакових бортових комп’ютера під назвою «Rover Compute Element» (RCE) під управлінням процесора RAD750 з частотою 200 МГц; вони містять радіаційностійку пам’ять. Кожен комп’ютер включає в себе 256 кБ EEPROM, 256 МБ DRAM, і 2 ГБ флеш-пам’яті. Ця кількість, в цілому, більше 3 МБ EEPROM, 128 Мб DRAM, і 256 Мб флеш-пам’яті, які були на марсоходах Спірит і Марсохід «Опортюніті» Використовується багатозадачна ОСРВ VxWorks. Комп’ютер постійно стежить за марсоходом: наприклад, сам може підвищити або знизити температуру в ті моменти, коли це необхідно. Він дає команди на фотографування, керування марсоходом, відправку звіту про технічний стан інструментів. Накази марсоходу передаються операторами із Землі. Комп’ютери використовують процесор RAD750, який є наступником процесора RAD6000, використаного в Mars Exploration Rover. RAD750 здатний виконувати до 400 мільйонів операцій в секунду, тоді як RAD6000 здатний виконувати до 35 мільйонів операцій в секунду. З двох бортових комп’ютерів один налаштований як резервний і візьме на себе управління в разі виникнення проблем з основним комп’ютером. Марсохід має Інерціональний Вимірювальний Пристрій (Inertial Measurement Unit), він надає інформацію про місцезнаходження марсохода, використовується як навігаційний інструмент.
- Зв’язок: «К’юріосіті» має дві системи зв’язку. У першу входять передавач і приймач X-діапазону, за допомогою яких марсохід зв’язується безпосередньо з Землею, зі швидкістю до 32 кбіт/с. Друга працює в діапазоні ДМВ (UHF) і створена на базі програмно-визначальної радіосистеми Electra — Lite, розробленої в JPL спеціально для космічних апаратів. ДМВ-радіо використовується для зв’язку з штучними супутниками Марса. Незважаючи на те, що у «К’юріосіті» є можливість прямого зв’язку з Землею, велика частина даних буде ретранслюватись орбітальними апаратами, що забезпечують більшу пропускну здатність за рахунок більшого діаметра антен і більш потужних передавачів. Швидкості передачі даних між «К’юріосіті» і кожним орбітальним апаратом можуть бути 2 Мбіт/с (Марсіанський розвідувальний супутник) і 256 кбіт/с (Марс Одіссей), кожен супутник має можливість тримати зв’язок з «К’юріосіті» приблизно 8 хвилин в день. Також у орбітальних апаратів помітно більше часове вікно в якому є можливість зв’язку з Землею. При посадці телеметрія могла відслідковуватися всіма трьома супутниками, що знаходяться на орбіті Марса: Марс Одіссей, Марсіанським розвідувальним супутником і Марс-експрес — Європейського космічного агентства. Марс Одіссей служив як ретранслятор і передавав телеметрію на Землю в потоковому режимі. На Землі сигнал приймали з затримкою в 13 хвилин 46 секунд, необхідних для подолання радіосигналом відстані між планетами.
- Маніпулятор: На ровері встановлений трьохсуглобовий маніпулятор довжиною 2,1 м, на якому змонтовані 5 приладів загальною масою близько 30 кг. Вони змонтовані на кінці маніпулятора в хрестоподібній вежі-турелі (turret), здатної повертатися на 350 градусів. Діаметр башти з інструментами становить близько 60 см. Під час руху маніпулятор складається. Два прилади: APXS і MAHLI — є контактними (in-situ) інструментами. Решта 3 прилади: ударний дріль, щітка (brush) і механізм для забору (scooping) і просіювання зразків ґрунту — виконують функції видобутку і приготування матеріалу (зразків) для дослідження. Дріль має 2 запасних бура. Вона здатна робити отвори в камені діаметром 1,6 см і глибиною в 5 см. Добуті маніпулятором зразки можуть, також досліджуватися приладами SAM і CheMin, які розташовані в передній частині корпусу ровера. Через різницю між земною і марсіанською (38% земної) гравітацією, масивний маніпулятор піддається різного ступеня деформації, для компенсації різниці якої, встановлюється спеціальне програмне забезпечення (ПЗ). Робота маніпулятора з даними ПЗ в умовах Марса вимагає додаткового часу для налагодження.
- Мобільність марсохода: Як і в попередніх марсоходах — Mars Exploration Rovers і Mars Pathfinder, «К’юріосіті» має платформу з науковим обладнанням, все це встановлено на шести колесах, кожне з яких має свій електродвигун, причому два передніх і два задніх колеса будуть брати участь у керуванні, що дозволить апарату розвертатися на 360 градусів, залишаючись при цьому на місці. Колеса «К’юріосіті» значно більше, ніж ті, які використовувалися в попередніх місіях. Кожне колесо має певну конструкцію, яка буде допомагати марсоходу підтримувати тягу, якщо він застрягне в піску, також колеса марсохода будуть залишати слід у вигляді регулярного відбитку на піщаній поверхні Марса. У цьому відбитку за допомогою коду Морзе у вигляді отворів записані букви JPL (Лабораторія реактивного руху, англ. Jet Propulsion Laboratory). За допомогою бортових камер марсохід розпізнає елементи регулярного відбитка коліс (візерунки) і зможе визначити пройдену відстань.
- Підвіска: Високу прохідність марсохода забезпечує запатентована в США підвіска Rocker-bogie.
Дослідницькі прилади
Наукові прилади апарату дозволяють ефективно виявляти органічні молекули й визназначати їх структуру, а також зондувати товстий шар ґрунту в пошуках слідів води за допомогою нейтронного детектора, створеного Роскосмосом. За допомогою інфрачервоного лазера можна буде видаляти з мінералів зайві нашарування (пил, продукти корозії) й одразу здійснювати лазерний хімічний аналіз на відстані до 10 метрів. «Серце» наукової апаратури — прилад SAM. Він буде визначати хімічний склад ґрунту й шукати в ньому органічні молекули. Цей прилад буде передавати п’яту частку всіх даних з Марса.
Список основних приладів на марсоході:
- Три спеціальні камери було розроблено компанією Malin Space Science Systems. Вони використовують однакові компоненти, зокрема модуль обробки зображень, світлочутливі елементи (ПЗС-матриці — 1600×1200 пікселів) та RGB фільтри Байєра
- MastCam: Система складається з двох камер, і містить багато спектральних фільтрів. Можливе отримання знімків в природних кольорах розміром 1600×1200 пікселів та відео з роздільною здатністю 720p (1280×720), апаратною компресією та з частотою до 10 кадрів на секунду. Перша камера (Medium Angle Camera — MAC), має фокусну відстань 34 мм і 15-градусне поле зору, 1 піксель дорівнює 22 см на відстані 1 км. Друга камера (Narrow Angle Camera — NAC) має фокусну відстань 100 мм, 5,1 градусне поле зору, 1 піксель дорівнює 7,4 см на відстані 1 км. Кожна камера має по 8 Гб флеш-пам’яті, яка здатна зберігати більше 5500 необроблених зображень, є підтримка JPEG-компресії й стиснення без втрати якості. В обох камерах є функція автоматичного фокусування, яка дозволяє їм сфокусуватися на об’єктах, від 2,1 м до нескінченності. Незважаючи на наявність у виробника конфігурації з трансфокатором, камери не мають зуму, оскільки часу для тестування не залишалося. Кожна камера має вбудований фільтр Байера RGB і по 8 ІЧ-фільтрів. У порівнянні з панорамної камерою, яка стоїть на «Спірит» і «Опортьюніті» (MER) і отримує чорно-білі зображення розміром 1024 × 1024 пікселів, камера MAC MastCam має кутовий дозвіл в 1,25 рази вище, а камера NAC MastCam — в 3,67 рази вище.
- Mars Hand Lens Imager (MAHLI): складається з камери, закріпленої на роботизованій руці марсохода й застосовується для отримання мікроскопічних зображень гірських порід та ґрунту. Камера отримує зображення розміром 1600×1200 пікселів з роздільною здатністю до 14,5 мкм на піксель. Має фокусну відстань від 18,3 до 21,3 мм і поле зору від 33,8 до 38,5 градусів. Для роботи в темряві є вбудована світлодіодна підсвітка (звичайна біла й ультрафіолетова). Ця камера здатна сфокусуватися на об’єктах від 1 мм. Система може також зробити серію зображень для подальшої обробки знімка. Є можливість зберегти необроблене фото без втрати якості або ж зробити стиснення в JPEG форматі.
- Mars Descent Imager (MARDI) передавала під час спуску на поверхню Марса кольорове зображення розміром 1600×1200 пікселів з витримкою 1,3 мс та з частотою 5 кадрів на секунду. Камера почала зйомку на висоті 3,7 км і закінчила на висоті 5 метрів над поверхнею Марса, зйомка тривала близько 2 хвилин. Містить 8 Гб вбудованої пам’яті, яка може зберігати більше 4000 фотографій. Знімки з камери дозволили побачити навколишній рельєф на місці посадки.
- ChemCam: це набір інструментів дистанційного дослідження, зокрема спектрометр Laser-Induced Breakdown Spectroscopy (LIBS) та камера Remote Micro-Imager (RMI). LIBS генерує 50-75 імпульсів інфрачервоного лазера з довжиною хвилі 1067 нм та загальною тривалістю 5 наносекунд, і фокусується на зразках на відстані до 7 метрів. Прилад аналізує спектр світла, що випромінюється плазмою зразка, у видимому, ультрафіолетовому й ближньому інфрачервоному діапазонах (240–800 нм). RMI-камера використовує оптику LIBS і дозволяє розгледіти об’єкти розмірами від 1 мм на відстані 10 м, поле зору на таких відстанях становить 20 см. ChemCam було розроблено в Лос-Аламоській національній лабораторії та французькій лабораторії CESR. Вартість ChemCam для НАСА становила близько $10 млн, зокрема, перевитрати близько $1,5 млн. Роздільна здатність устаткування в 5-10 разів вища, ніж у встановленого на попередні марсоходи. З семи метрів ChemCam може визначити тип досліджуваної породи (наприклад, вулканічна або осадова), структуру ґрунту й каміння, відстежити домінуючі елементи, розпізнати лід і гідратовані мінерали, дослідити сліди ерозії на каменях і візуально допомогти при дослідженні порід маніпулятором. Вартість ChemCam для НАСА склала близько $ 10 млн, у тому числі перевитрата близько $ 1,5 млн. Інструмент був розроблений Лос-Аламоською національною лабораторією спільно з французькою лабораторією CSR. Розробка була завершена, а обладнання було готове до доставки в JPL в лютому 2008 року.
- Alpha-particle X-ray spectrometer (APXS): рентгенівський спектрометр на альфа-частинках буде опромінювати альфа-частинками зразки й зіставляти спектри в рентгенівських променях для визначення елементного складу породи. Прилад створено Канадським космічним агентством. MacDonald Dettwiler (MDA) — Аерокосмічна канадська компанія, яка будує Canadarm і RADARSAT, несуть відповідальність за проектування і будівництво APXS. Команда з розробки APXS включає в себе членів з Університету Гвельфів, Університету Нью-Брансвік, Університету Західного Онтаріо, НАСА, Університет Каліфорнії, Сан-Дієго і Корнельського університету.
- Collection and Handling for In-Situ Martian Rock Analysis (CHIMRA): CHIMRA являє собою ківш 4х7 сантиметрів, який зачерпує ґрунт. У внутрішніх порожнинах CHIMRA він просівається через сито з осередком 150 мікрон, чому допомагає робота вібромеханізму, зайве віддаляється, а на просіювання відправляється наступна порція. Всього проходить три етапи паркану з ковша і просіювання ґрунту. В результаті залишається трохи порошку необхідної фракції, який і відправляється в ґрунтоприймач, на тілі ровера, а зайве викидається. У результаті з усього ковша на аналіз надходить шар ґрунту в 1 мм. Підготовлений порошок вивчають прилади CHEMIN і SAM.
- CheMin: цей спектрометр досліджує хімічний і мінералогічний склад за допомогою рентгенівського флуоресцентного аналізу й рентгенівської дифракції. Chemin дозволяє визначити велику кількість корисних копалин на Марсі. Інструмент було розроблено Девідом Блейком з Ames Research Center та Лабораторії реактивного руху (англ. Jet Propulsion Laboratory) НАСА. Марсохід буде бурити гірські породи, а отриманий порошок збирається інструментом та опромінюється рентгенівськими променями. Дифракція рентгенівських променів різна для різних мінералів, тому картина дифракції дозволяє визначити структуру речовини. Інформацію про світність атомів і дифракційну картину буде знімати спеціально підготовлена E2V CCD-224 матриця розміром 600х600 пікселів. У «К’юріосіті» є 27 осередків для аналізу зразків, після вивчення одного зразка осередок може бути перевикористаний, але аналіз буде мати меншу точність через забруднення попереднім зразком. Таким чином у ровера є всього 27 спроб для повноцінного вивчення зразків. Ще 5 запаяних осередків зберігають зразки з Землі. Вони потрібні щоб протестувати працездатність приладу в марсіанських умовах. Для роботи приладу потрібна температура −60 градусів Цельсія, інакше будуть заважати перешкоди від приладу DAN.
- Sample Analysis at Mars (SAM): цей вимірювальний комплекс інструментів є найважчим і найбільшим на марсоході, його маса 38 кг, це майже половина маси всіх наукових приладів на борту. SAM було розроблено й зібрано в Goddard Space Flight Center. За допомогою трьох комбінованих сенсорних систем він має відповісти на питання, чи було колись на Марсі середовище, придатне для живих організмів, і чи існує таке середовище на планеті сьогодні. SAM дозволяє аналізувати як тверді зразки, наприклад, зразки ґрунту, так і атмосферний газ, і здатен виявляти та аналізувати органічні сполуки, легкі елементи, а також співвідношення ізотопів у атмосфері. Попередня підготовка зразків відбувається в Sample Manipulation System (SMS), де передбачено численні сита та 74 контейнери. Комплекс має також дві електропечі потужністю 40 Вт із максимальною температурою до 1100 °C, котрі дозволяють виділити леткі речовини з твердих зразків, а також здійснити піроліз органічних сполук. Отриманий газ (чи безпосередньо проба з атмосфери) потрапляє в Chemical Separation and Processing Laboratory (CMPL). Тут є ціла система для подальшої підготовки до вимірювання, що складається з 50 клапанів, 15 вентильних блоків, великої кількості абсорбційних комбінованих фільтрів, змішувачів, сепараторів та насосів. Після такої підготовчої фази газ може бути спрямовано послідовно в один з трьох вимірювальних приладів: газовий хроматограф (GS — Gas Chromatograph), лазерний спектрометр Tunable Laser Spectrometer (TLS) чи квадрупольний мас-спектрометр Quadrupole Mass Spectrometer (QMS). GS використовується для розділення суміші газів на компоненти, які в подальшому спрямовуються на мас-спектрометр QMS. TLS дозволяє точно визначити відношення ізотопів кисню та вуглецю у вуглекислому газі (CO2) та метані (CH4), і, у свою чергу, дозволяє визначити походження цих газів (біологічне або геохімічне).
- Radiation assessment detector (RAD): він досліджує радіаційний фон усередині марсохода. Зібрані детектором RAD дані на шляху до планети й на поверхні Марса служитимуть для оцінки рівня радіації в майбутніх місіях. Прилад встановлений практично в самому «серці» ровера, і тим самим імітує астронавта, що знаходиться всередині космічного корабля. RAD був включений першим з науково інструментів для MSL, ще на навколоземній орбіті, і фіксував радіаційний фон всередині апарату — а потім і всередині ровера під час його роботи на поверхні Марса. Він збирає дані про інтенсивність опромінення двох типів: високоенергетичних галактичних променів і частинок, що випускаються Сонцем. RAD був розроблений в Німеччині Південно-західним дослідним інститутом (SwRI) позаземної фізики в групі Christian-Albrechts-Universität zu Kiel за фінансової підтримки управління Exploration Systems Mission в штаб-квартирі НАСА та Німеччини.
- Dynamic Albedo of Neutrons (DAN): прилад використовується для виявлення водню, води й льоду на поверхні Марса, складається з імпульсного нейтронного генератора та детектора. Для MSL прилад надано Федеральним Космічним Агентством (Роскосмос). Вартість розробки приладу становила понад $ 3 млн. Є спільною розробкою НДІ автоматики ім. Н. Л. Духова при «Росатомі» (імпульсний нейтронний генератор), Інституту космічних досліджень РАН (блок детектування) і Об’єднаного інституту ядерних досліджень (калібрування). До складу приладу входять імпульсне джерело нейтронів і приймач нейтронного випромінювання. Генератор випромінює в сторону марсіанської поверхні короткі, потужні імпульси нейтронів. Тривалість імпульсу становить близько 1 мкс, потужність потоку — до 10 млн нейтронів з енергією 14 МеВ за один імпульс. Частинки проникають в ґрунт Марса на глибину до 1 м, де взаємодіють з ядрами основних породоутворюючих елементів, внаслідок чого, сповільнюються і частково поглинаються. Частина, що залишилася нейтронів відбивається і реєструється приймачем. Точні виміри можливі до глибини 50 — 70 см. Крім активного обстеження поверхні Червоної планети, прилад здатний вести моніторинг природного радіаційного фону поверхні (пасивне обстеження).
- Rover environmental monitoring station (REMS): Метеорологічний комплекс приладів для вимірювання атмосферного тиску, вологості, напряму вітру, повітряних і наземних температур, ультрафіолетового випромінювання. REMS дасть нові уявлення про місцевий гідрологічний стан, про руйнівний вплив ультрафіолетового випромінювання й про можливі ознаки життя в поверхневому ґрунті планети. Дослідницька група на чолі з Хав’єром Гомес-Ельвіром, Центру астробіології (Мадрид) включає Фінський Метеорологічний інститут як партнера. Встановили її на щоглу камери для вимірювання атмосферного тиску, вологості, напрямку вітру, повітряних і наземних температур, ультрафіолетового випромінювання. Всі датчики розташовані в трьох частинах: дві стріли приєднані до марсоходу, Remote Sensing Mast (RSM), Ultraviolet Sensor (UVS) знаходиться на верхній щоглі марсохода, і Instrument Control Unit (ICU) всередині корпусу.
- MSL entry descent and landing instrumentation (MEDLI): Основною метою приладу було вивчення атмосферного середовища на Марсі під час спуску після гальмування й відокремлення теплозахисного екрану. Саме в цей період були зібрані необхідні дані про марсіанську атмосферу. Ці дані будуть використані в майбутніх місіях. Прилад складається з трьох основних вузлів: MEDLI Integrated Sensor Plugs (MISP), Mars Entry Atmospheric Data System (MEADS) і Sensor Support Electronics (SSE).
- Hazard avoidance cameras (Hazcams): марсохід має дві пари чорно-білих навігаційних камер, розташованих з боків апарату. Вони застосовуються для оцінки небезпеки під час пересування марсоходу і для безпечного наведення маніпулятора на зразки каміння й ґрунту. Камери роблять 3D зображення (поле зору кожної камери — 120 градусів), складають карту місцевості попереду марсохода. Складені карти дозволяють марсоходу уникати випадкових зіткнень і використовуються програмним забезпеченням апарату для вибору необхідного шляху під час подолання перешкод.
- Navigation cameras (Navcams): для навігації марсохід використовує пару чорно-білих камер, які встановлено на щоглі для стеження за пересуванням. Камери мають 45 градусне поле зору, роблять 3D-зображення. Їх роздільна здатність дозволяє бачити об’єкт розміром в 2 сантиметри з відстані 25 метрів.
Посадка та її система
Посадковий модуль відокремився від перельотного модуля перед входом в атмосферу. Для гальмування посадкового модуля спочатку використовувався опір атмосфери, потім парашут, і, нарешті, гальмівні двигуни. Сам посадковий модуль не одразу торкнувся поверхні планети — на певній висоті ровер опустився на тросах, які потім від’єдналися, а посадковий модуль відлетів убік, щоб не забруднювати реактивними вихлопами місце посадки ровера. 6 серпня 2012 космічний апарат Curiosity здійснив успішну посадку на Марс у кратері Ґейла.
Спуск на поверхню Марса великої маси дуже складний. Атмосфера занадто розріджена, щоб парашути й аеродинамічне гальмування виявилися ефективними, однак достатньо щільна, щоб забезпечити істотне гальмування ракетними двигунами, оскільки використання тяги реактивного струменя на надзвукових швидкостях пов’язане з нестабільністю, попередні місії використовували аеробалони для пом’якшення удару під час посадки, але новий марсохід занадто важкий для використання такого варіанту.
Панорами Марса, які зробив марсохід «К’юріосіті»



{kind=link}

{kind=link}


Через 10 років після приземлення марсохід NASA Curiosity все ще в строю.